|
|
|
クシックマウス2009年より,現行マイクロマウスをマイクロマウスクラシックと呼ぶそうです.更に名前が変わって,現在は,クラシックマウスと呼ぶそうです. ハーフサイズマウスの回路を一部変更して拡大コピーして作成したマウスです. 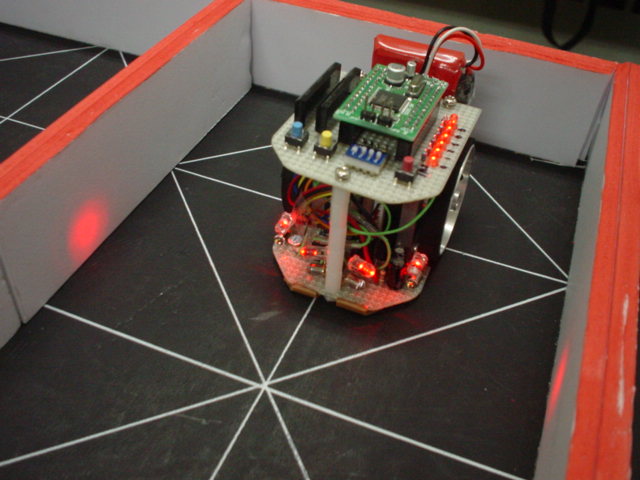 ハーフサイズとの比較,モータの大きさが違う分だけ大きくなっています. 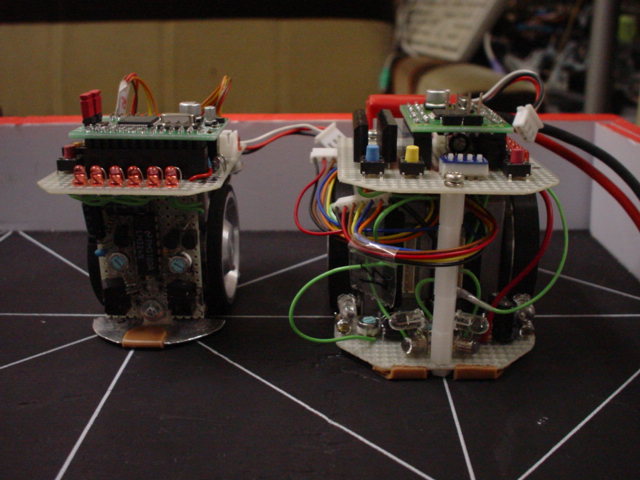 モータはメジャーなKH39EM2-801です. 走行性能より壁との衝突回避を重視して,モーター幅2個分+タイヤの最小幅で作成しました. ステッピングモータ駆動には,ステッピングモータ専用ICではなく,FETスイッチMP4401を用いました.定格以上の電圧を加えてモータを回しているので低速時はパワーをかけすぎになりますが,停止状態は電源を切り,低速回転している時間を極力短くしてモータの負荷を下げました. これでも最高速を出すとやっぱり電流が低下し,電源の昇圧化を考えないと高速回転はできません. センサはハーフサイズより長距離を見ないといけないので,大容量の可視光LEDとフォトトランジスタを用いました. 地区大会で照明の条件が厳しくなければなんとか動作します. 全国大会レベルだと,わざと照明を明るくしてあるそうなので,その場合は壁とバックグラウンドの違いを検知できないかもしれません.(エキスパート決勝は無理) DC成分(バックグラウンド)を除くように回路を作り直さないといけないでしょう. 簡単な迷路でうまくいったときのマウス 九州地区大会で完走したけどゴール内でぶつかってしまった自分のマウス (たぶん,自動計測用のゴールセンサの赤外線が原因です) サーキット走行 スラローム,斜め走行まで含んだプログラムを参考までに公開します. (バグがあるかもしれません,使用は自己責任で.バグレポートは歓迎します) ソースファイル(KNCT-MM1_v12.c) |



